
研究计划执行情况概述。
(1)按计划执行情况。
项目研究工作严格按照计划进行,已完成了所有的研究任务,并对部分研究内容进行了拓展性研究。对项目集成验证平台进行了仿真和实验测试,在城市/城际/高速的开放道路环境开展了自主驾驶实验研究,并且完成了各合作单位集成联调;在基础理论和方法研究方面,深入开展了自主车辆环境感知、决策规划与路径跟踪控制、以及脑机接口与听觉信息处理的新理论和新算法研究。在基于深度学习的交通标志识别方法、基于迁移学习的半结构化道路识别方法、基于多目标增强学习的驾驶策略优化方法、基于模型预测控制的车辆速度跟踪算法、基于滤波器组的CCA(FBCCA)方法在脑机接口中的应用、基于LPC与多尺度小波变换的降噪方法等方面取得了重要研究进展。
(2)研究目标完成情况。
项目圆满完成了预期的研究目标。重点围绕城区道路和城际公路(包括各种支路、干路、绕城公路、快速路和高速公路等)正常交通环境的无人驾驶车辆环境感知与理解、智能决策与控制等方面的基本科学问题,开展融理论、关键技术与工程优化于一体的创新性综合集成研究,同时集成了脑―机接口等领域的相关研究成果,构建了具有开放式、模块化体系结构的无人驾驶车辆集成验证平台,实现了真实城区和城际道路正常交通环境和正常天气条件下的长距离自主驾驶。
取得的主要研究进展、重要结果、关键数据等及其科学意义或应用前景。
1. 基于频域尺度分析的视觉注意建模及在场景理解和应急行为决策中的应用
2.基于道路结构约束的环境综合感知模型与方法。
2.1 基于分块核函数特征的交通标志识别新方法
2.2 基于HOG与分块核函数特征的交通标志识别新方法
2.3 行道线检测算法研究
2.4 基于steerable滤波的车道线检测新方法
2.5 基于逆投影变换的车道线确认新方法
2.6 基于LDA分类的车道线对比度增强新方法
2.7 基于形状先验、颜色表示和鉴别性分析的道路检测新方法
2.8 前方车辆行人检测与跟踪方法研究
2.9 适用于无人驾驶车辆的基于激光雷达和图像融合的行人检测方法
2.10 基于类Haar特征结合AdaBoost分类器的车辆检测方法
2.11 多尺度异构信息融合方法研究
2.12 基于可见光与红外数据融合的地形分类算法研究
2.13 基于中心化核对齐的多核聚类算法研究
3.实现了复杂场景中道路标志线的准确识别与跟踪
4.实现了基于双目视觉的车辆检测与定位
5.采用视觉传感器与雷达融合的方法识别道路可行驶区域
6. 利用多维变尺度栅格图方法实现多源信息的融合与道路环境建模
7.开展了结构化与半结构化道路环境下的自主驾驶实验
8.鲁棒声学特征提取方法研究
9.声学事件检测方法研究
10.无人车声音感知和理解原型系统的构建
参加智能车比赛与获奖情况
2013年,获得“中国智能车未来挑战赛”城区道路测试第一名。
2014年11月,军交猛狮车队包揽“中国智能车未来挑战赛”第一、第二名。
2015年,获得“中国智能车未来挑战赛”第一名。
2016年,获得“中国智能车未来挑战赛”第一名,第二名。
2014年9月,军交猛狮车队获得“跨越险阻2014”首届地面无人平台挑战赛第四名。
2016年,获得“跨越险阻2016”地面无人系统挑战赛A组和B组第一名
项目取得成果的总体情况。
项目执行期间,项目组共发表学术论文23篇,其中9篇进入SCI检索源,且SCI影响因子大于1的期刊论文8篇。
参加本项目研究工作的研究生包括博士研究生9名、硕士研究生32名,上述研究生的论文选题都是全部或者部分结合本项目的研究内容,以无人驾驶技术关键理论和方法研究为目标。




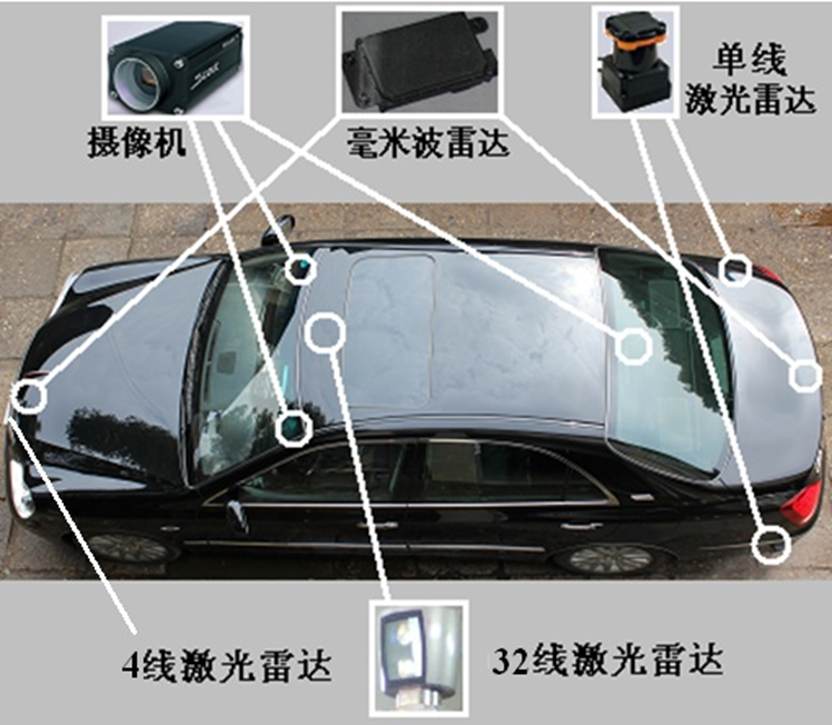










自主驾驶车辆关键技术与集成验证平台