
年度研究计划
本研究工作根据项目总体目标,划分为两个大的阶段:第一阶段以重点科学问题的研究和车辆自主驾驶系统的升级为重点,到2014年10月份左右,使系统具备完成“武汉-衡阳”的自主驾驶实验。第二阶段再经过两年左右的性能完善,完成从珠海到北京的长距离自主驾驶任务
预期研究成果
项目将研制一辆面向城市与城际道路环境的无人驾驶车辆集成验证平台,实现的性能指标包括:以遵守基本交通法规为前提,在正常天气条件、真实城区和城际道路(包括各种支路、干路、绕城公路、快速路和高速公路等)正常交通环境下,实现无人驾驶车辆2000公里以上自主行驶(人工干预里程小于2%)。具体包括:
1. 无人驾驶车辆集成验证平台的性能指标:
(1) 能够有效地避障、超车、汇入车流,顺畅通过路口、匝道和高架桥等;
(2) 能够准确识别交通信号灯信息、常见交通标志(标识)符和行车灯语等,并做出正确安全的动作响应;实现道路环境中车道线检测、车辆检测、交通标志的动态检测、识别和理解技术,使无人驾驶车辆能够在不同光照、不同道路、不同场景条件下遵照交通标志的指示行车。
(3) 能够准确检测和识别各种汽车警笛及部分与行驶密切相关的其它声音信息,提高无人驾驶车辆对行驶环境的辅助感知能力;
(4) 探索与驾驶行为相关的脑电信号检测,实现一种以上利用脑电信号的无人驾驶车辆辅助决策;
(5) 对本重大研究计划已资助的相关培育项目提供功能验证平台。
2. 基础理论和方法方面的创新成果:
(1) 多源多谱信息的层次化融合决策框架体系;
(2) 基于稀疏表示的交通标志特征表示模型;
(3) 建立自主驾驶车辆视觉认知计算的注意力机制,实现变粒度信息抽取算法;
(4) 考虑动力学约束的自适应分层局部路径规划方法;
(5) 基于数据驱动和机器学习的无人车辆纵向与侧向优化控制方法;
(6) 高可靠性自主驾驶系统软、硬件总体框架;
(7) 构建统一高效解码的BCI方法,利用智能车的环境建模信息,实现基于脑-机接口的导航交互方法;
(8) 提出环境先验知识不充分条件下的声学事件检测方法,以及基于声音上下文内容的环境状态识别方法;
(9) 发表论文 40篇左右,其中,SCI检索15篇,包括国际著名的学术杂志,如IEEE Transactions系列, Pattern Recognition,Pattern Recognition Letters等,以及比较著名的国际会议,如ICCV,CVPR等;
(10) 申请专利15项;
(11) 培养研究生40名左右。




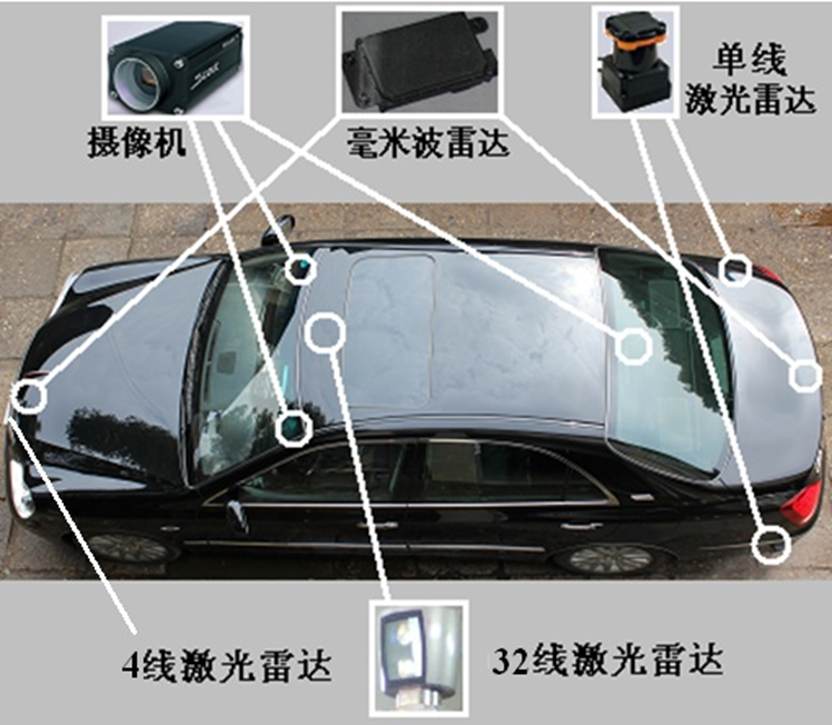










自主驾驶车辆关键技术与集成验证平台